ROVR发布全球最大的开放驾驶数据集,推动空间人工智能与自主系统创新
2025年8月26日——加利福尼亚州圣克拉拉
在北美ADAS和AV技术峰会上,ROVR宣布发布其开放数据集,标志着空间人工智能、机器人和自主系统领域的重要进展。这一开放性举措旨在通过高质量的真实世界数据支持自动驾驶汽车生态系统,为下一代智能移动解决方案提供动力。
此次发布的数据集是ROVR使命中的重要里程碑,致力于实现现实世界数据的民主化访问,并解锁理解和与物理空间交互的下一代人工智能模型。
以人为中心的世界观
与传统数据集专注于机器视觉不同,ROVR开放数据集捕捉了人类驾驶员眼中的世界——包括他们看到的内容、行为方式以及与周围环境的互动。
该数据集由ROVR定制的移动感知单元(由全球贡献者网络运营)收集,是构建世界上最大开放获取驾驶数据集的一部分,目标是制作100万个30秒短片。
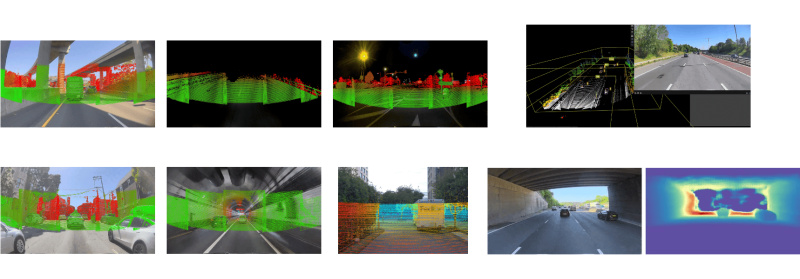
每个剪辑包含:
- 原始LiDAR点云用于详细的三维空间重建
- 高分辨率RGB视频通过前置行车记录仪
- 高频IMU数据捕捉运动动态
- 厘米级RTK GPS定位用于精确的地面实况定位
- 匿名场景用于隐私保护和道德人工智能开发
初始开放版本包含1,500个完全同步的片段,总数据量超过1TB。这些片段涵盖了城市、郊区和高速公路等多种环境,包括施工区域、学校路口、交通拥堵和动态行人场景。
除了原始传感器数据,ROVR还构建了可扩展的注释管道,用于语义分割、对象检测、场景理解和意图预测,使研究人员和工程师能够为空间AI训练下一代基础模型。
未来版本的数据集将包括:
- 人工注释的2D/3D边界框、语义标签和行为提示
- 场景图生成以捕捉对象之间的空间和时间关系
- 用于行为建模和策略学习的动作和意图标签
- 领域多样性元数据支持跨地域和边缘情况的泛化
这些功能旨在支持各种尖端应用,包括:
- 自动驾驶和路径规划
- 机器人导航和SLAM基准测试
- AR/VR空间感知和遮挡推理
- 多模态大模型(VLM、VLM+3D)预训练
- 为智慧城市和基础设施创建数字孪生
ROVR开放数据集使研究人员、开发者和机构能够训练、基准测试和部署能够在现实世界中安全智能运行的下一代AI模型。通过公开数据集,ROVR旨在促进全球AI和机器人社区的协作、可重复性和透明度。
为什么是现在,为什么是开放
随着感知和现实世界理解成为人工智能发展的下一个重大前沿,ROVR选择在此时发布数据集。过去一年,基础模型彻底改变了语言和图像理解,但空间人工智能仍因缺乏大规模高质量的真实世界数据集而受限。
感知正在迅速崛起,成为人工智能的下一个前沿领域。了解人类如何在不同环境中实时感知和解读物理世界,对于构建稳健、可泛化的人工智能系统至关重要。与静态地图或合成环境不同,现实世界的多模态数据提供了丰富性、模糊性和复杂性,这些正是人工智能需要掌握的关键。
ROVR开放数据集为人类规模的导航和环境意识弥合了模拟与街道级智能之间的差距。通过公开此数据集,ROVR旨在赋能人工智能、机器人和智能基础设施生态系统的研究人员、开发者和建设者。
该数据集是在许可证下发布的,适用于非商业用途,并计划未来向商业合作伙伴提供扩展版本,包括完整序列和密集注释。这一计划体现了ROVR对开放基础设施、集体智慧以及现实世界人工智能系统负责任开发的承诺。
由DePIN社区打造
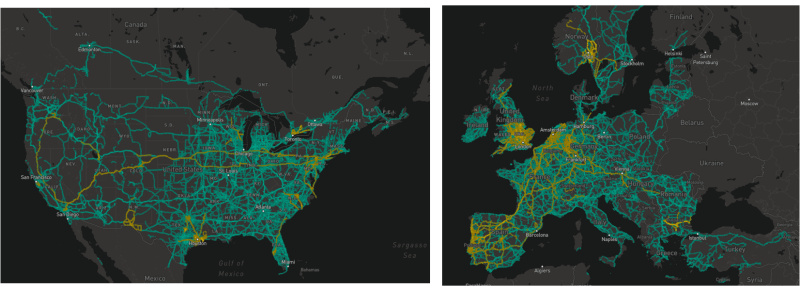
ROVR由一个去中心化的贡献者网络支持,这些贡献者包括配备了ROVR即插即用数据收集硬件的个人和车队。与大型科技公司的中心化数据收集不同,ROVR的模型具有以下特点:
- 可扩展— 数千名贡献者,并且每天都在增长
- 全球的— 横跨城市、郊区和新兴市场
- 激励— 贡献者通过分享经过验证的数据赚取代币
- 可组合— 实现与各种AI、AR/VR和机器人堆栈的集成
这种以社区为先的做法已经产生了道路覆盖超过2000万公里以及更多已部署3500台设备,随着对现实世界3D数据需求的增长,使用率也在不断提高。
 从数据到部署
从数据到部署
除了原始数据,ROVR正在为Spatial AI构建全栈管道,包括:
- 设备上的智能高效收集
- 基于云的注释工具用于可扩展标签
- API和SDK将3D世界理解融入AI系统
- 合作伙伴关系与各行各业的研究人员、初创企业和企业
开放数据集的启动是构建共享基础的重要一步,适用于所有正在构建AI原生物理世界的人——无论是自动驾驶汽车、仓库机器人、AR眼镜还是智慧城市。
如何访问数据集
ROVR开放数据集现已开放下载和探索。
https://rovr.network/#/dataset
鼓励研究人员、开发人员、教育工作者和创新者加入ROVR生态系统,帮助塑造空间AI的未来。
关于ROVR
ROVR是Spatial AI的基石——一个去中心化的网络,旨在将日常车辆转变为物理世界的智能3D地图绘制器。ROVR通过全球贡献者社区,收集、构建和分发大规模3D数据,用于人工智能、机器人、自主导航等领域。
坚信开放基础设施、公平激励和全球包容性,ROVR正在为智能、AI优先的星球构建基础层。
媒体联系人:xinran.li@rovr.network
了解更多信息:

接触
首席运营官
李欣然
ROVR实验室公司
xinran.li@rovr.network

 币安网
币安网 欧易OKX
欧易OKX HTX
HTX Coinbase
Coinbase 大门
大门 Bitget
Bitget Bybit
Bybit K网(Kraken)
K网(Kraken) 双子星(Gemini)
双子星(Gemini) Upbit
Upbit 泰达币
泰达币 以太坊
以太坊 比特币
比特币 Solana
Solana USD Coin
USD Coin 瑞波币
瑞波币 币安币
币安币 First Digital USD
First Digital USD 狗狗币
狗狗币 Momentum
Momentum